N passengers per system; N is unlimited subject to being less than steady-state carrying capacity of elevator.
Passengers arrive at the elevator landings according to the
specifications of the passenger input files. Passengers may also
begin the simulation already in the car.
Passengers do not "fight" each other for position in entry and exit queues.
Passengers weigh 150 pounds each.
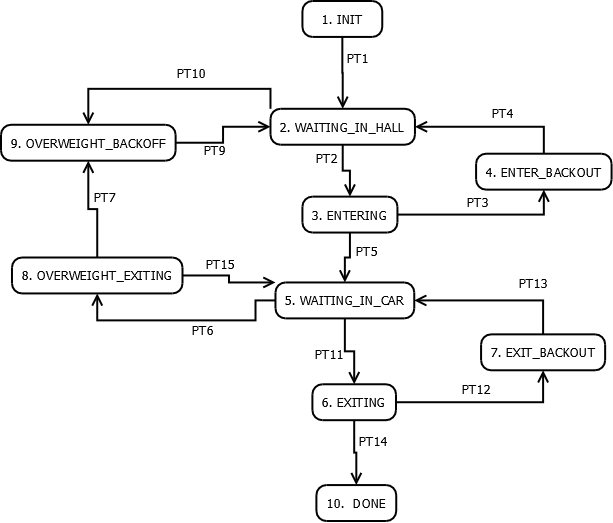
1.1: Passengers are prevented from entering or exiting the Car whenever the appropriate doors are not open far enough.
1.2: If Passenger p is outside the car and the CarWeightAlarm is
triggered, the passenger shall not try to enter the car or press a hall
call for 10 seconds after the doors fully close.
| Trigger # |
Trigger Conditions |
Actions |
| PT1 |
Injection time reached |
Passenger joins hall queue. |
| PT2 | Doors at start landing are open
wider than width, car is level or leveling is being ignored, car
lantern is consistent with
travelDirection, passenger has priority to use the door. |
|
| PT3 | After doorTraversalDelay, the
door is not open wide enough for the passenger to enter. |
Passenger registers a "failed to
enter" satisfaction deduction |
| PT4 | doorBackoutDelay expires |
Passenger rejoins hall queue at
the end of the queue. |
| PT5 | doorTraversalDelay expires and
the doors are open wider than passenger width. |
Passenger exits the hall queue
and joins the car queue. |
| PT6 | The CarWeightAlarm sounds and
this passenger is the last passenger in the car queue. |
Passenger stops monitoring the
car call. |
| PT7 | doorTraversalDelay expires and
the doors are open wider than the passenger width. |
Passenger rejoins hall queue. |
| PT9 | Doors are fully closed and
BackoffPeriod has elapsed. |
|
| PT10 | CarWeightAlarm sounds and the
passenger is in the hall queue with the doors at least partially open. |
|
| PT11 | Doors at destHallway are open
wider than passenger width, the car is level or leveling is being
ignored, the position indicator
indicates destFloor, and the passenger has priority to traverse the
door. OR, while the car is still at the startFloor and the doors
on the startHallway are still open, the lantern changes to a direction
that is inconsistent with the passengers travelDirection and the
passenger has priority to traverse the door. |
|
| PT12 | After doorTraversalDelay, the door is not open wide enough for the passenger to enter. | Passenger registers a "failed to exit" satisfaction deduction. |
| PT13 | doorBackoutDelay expires | Passenger rejoins the car queue
at the end of the queue. |
| PT14 | doorTraversalDelay expires and the doors are open wider than the passenger width. | Passenger records delivery time
and stops interacting with the simulation. |
| PT15 |
Car ceases to be overweight
before the passenger can exit the car. |
Passenger rejoins the car queue |
| State |
Description |
Actions |
| INIT |
passenger has not arrived at the
hallway yet |
none |
| WAITING_IN_HALL |
waiting for the car to arrive at the start floor/hall, pressing the hall call | Passenger presses and/or monitors the hall call. Passenger may register a "repeated call press" deduction. |
| ENTERING | in the process of entering the car | Passenger may register a "car
lantern direction change" deduction. |
| ENTER_BACKOUT | backing out because the passenger failed to enter | none |
| WAITING_IN_CAR | waiting for the car to arrive at the destination | Passenger presses and/or monitors the car call. Passenger may register "missedOpeningThreshold exceeded", "skipped destination" or "wrong motion" deductions. Passenger may register a "repeated call press" deduction. |
| EXITING | exiting the car at the start or
destination landing |
none |
| EXIT_BACKOUT | returning to the car because the passenger failed to exit | none |
| OVERWEIGHT_EXITING | exiting the car because it is overweight | Passenger registers a "failed to exit" satisfaction deduction. |
| OVERWEIGHT_BACKOFF | waiting after the overweight alarm has sounded | none |
| DONE | passenger delivered to destination | none |
| Drive
Speed
Values |
|||||||
| Drive
Command
Values |
FastSpeed
>= DriveSpeed >= SlowSpeed, UP |
SlowSpeed
>= DriveSpeed > LevelSpeed, UP |
LevelSpeed
>= DriveSpeed > 0, UP |
DriveSpeed ==
0,STOP |
LevelSpeed >= DriveSpeed > 0, DOWN | SlowSpeed
>= DriveSpeed > 0, DOWN |
FastSpeed
>= DriveSpeed >= SlowSpeed, DOWN |
| Fast,
Up |
X |
||||||
| Slow,
Up |
X |
X |
X |
X |
|||
| Level,
Up |
X |
X |
X |
||||
| Stop,
Stop |
X |
X |
X |
||||
| Level,
Down |
X |
X |
X |
||||
| Slow,
Down |
X |
X |
X |
X |
|||
| Fast,
Down |
X |
||||||
| Transition |
Condition |
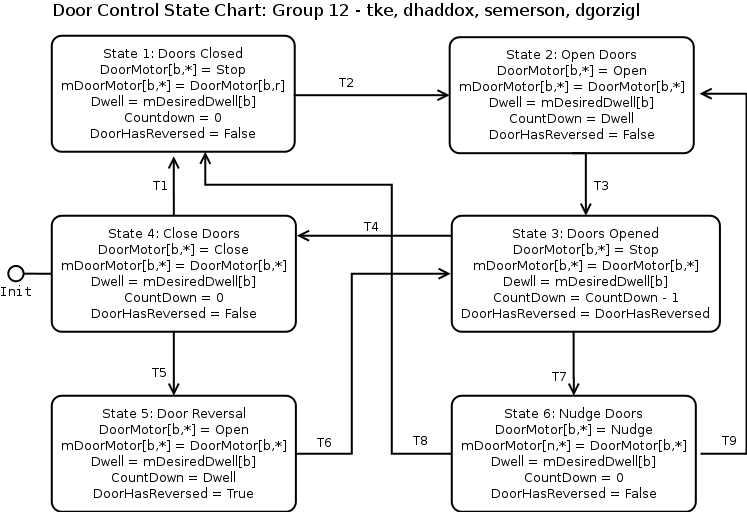
| 5.T.1 | mDoorClosed[b,r] == True |
| 5.T.2 | (mAtFloor[f,b] == True AND f == mDesiredFloor.f AND (mDersiredFloor.b == b OR mDesiredFloor.b == BOTH) AND (mDriveSpeed == (0,stop)) |
| 5.T.3 | mDoorOpened[b,r] == True |
| 5.T.4 | CountDown <= 0 AND DoorHasReversed == False AND mCarWeight[g] < MaxCarCapacity |
| 5.T.5 | mDoorReversal[b,r] == True OR mCarWeight[g] >= MaxCarCapacity |
| 5.T.6 | mDoorOpened[b,r] == True |
| 5.T.7 | CountDown <= 0 AND DoorHasReversed == True AND mCarWeight[g] < MaxCarCapacity |
| 5.T.8 | mDoorClosed[b,r] == True |
| 5.T.9 | mCarWeight[g] >= MaxCarCapacity |
| Requirements | |||||||||||||||
| States | 5.6.1 | 5.6.2 | 5.7.1 | 5.7.2 | 5.8 | 5.9 | 5.10 | 5.11 | 5.12 | 5.13 | 5.14 | ||||
| State 1: Doors Closed | X | X | X | ||||||||||||
| State 2: Open Doors | X | X | X | X | X | ||||||||||
| State 3: Doors Opened | X | X | X | X | |||||||||||
| State 4: Close Doors | X | X | X | ||||||||||||
| State 5: Door Reversal | X | X | X | ||||||||||||
| State 6: Nudge Doors | X | X | X | ||||||||||||
| Transitions | 5.6.1 | 5.6.2 | 5.7.1 | 5.7.2 | 5.8 | 5.9 | 5.10 | 5.11 | 5.12 | 5.13 | 5.14 | ||||
| 5.T.1 | X | ||||||||||||||
| 5.T.2 | X | X | |||||||||||||
| 5.T.3 | X | X | |||||||||||||
| 5.T.4 | X | ||||||||||||||
| 5.T.5 | X | X | |||||||||||||
| 5.T.6 | X | X | |||||||||||||
| 5.T.7 | X | ||||||||||||||
| 5.T.8 | X | ||||||||||||||
| 5.T.9 | X | ||||||||||||||
| Drive
Speed
Values |
|||||||
| Drive
Command
Values |
FastSpeed
>= DriveSpeed >= SlowSpeed, UP |
SlowSpeed
>= DriveSpeed > LevelSpeed, UP |
LevelSpeed
>= DriveSpeed > 0, UP |
DriveSpeed ==
0,STOP |
LevelSpeed >= DriveSpeed > 0, DOWN | SlowSpeed
>= DriveSpeed > 0, DOWN |
FastSpeed
>= DriveSpeed >= SlowSpeed, DOWN |
| Fast,
Up |
X |
||||||
| Slow,
Up |
X |
X |
X |
X |
|||
| Level,
Up |
X |
X |
X |
||||
| Stop,
Stop |
X |
X |
X |
||||
| Level,
Down |
X |
X |
X |
||||
| Slow,
Down |
X |
X |
X |
X |
|||
| Fast,
Down |
X |
||||||
| Transition |
Condition |
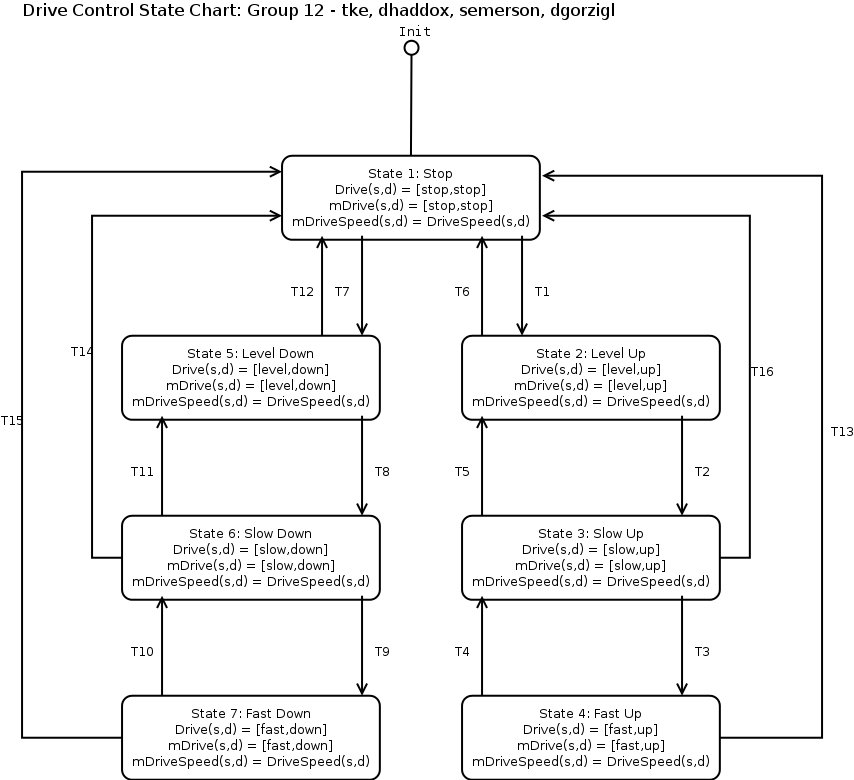
| 6.T.1 |
mEmergencyBrake == FALSE AND DriveSpeed == STOP AND ((DesiredDirection == UP AND mDoorClosed[*,*] == TRUE AND mDoorMotor[*,*] != OPEN AND mCarWeight < MaxCarWeight) OR mLevelUp == FALSE) |
| 6.T.2 | mCarWeight < MaxCarCapacity AND mDoorClosed[*,*] == TRUE AND mDoorMotor[*,*] != OPEN AND mEmergencyBrake == FALSE AND DriveSpeed(s,d) == (LevelingSpeed, UP) AND DesiredDirection == UP |
| 6.T.3 | mEmergencyBrake == FALSE AND DriveSpeed(s,d) == (SlowSpeed, UP) AND CommitPoint < mDesiredFloor(f) |
| 6.T.4 | mEmergencyBrake == FALSE AND CommitPoint == mDesiredFloor(f) |
| 6.T.5 | mEmergencyBrake == FALSE AND DriveSpeed(s,d) == (SlowSpeed, UP) AND CurrentFloor = mDesiredFloor(f) |
| 6.T.6 | MEmergencyBrake == TRUE OR (mLevelUp == TRUE AND (mDoorClosed[*,*] == FALSE OR DesiredDirection == STOP)) |
| 6.T.7 | mEmergencyBrake == FALSE AND DriveSpeed(s) == STOP AND ((DesiredDirection == DOWN AND mDoorClosed[*,*] == TRUE AND mDoorMotor[*,*] != OPEN) OR mLevelDown == FALSE) |
| 6.T.8 | mCarWeight < MaxCarCapacity AND mDoorClosed[*,*] == TRUE AND mDoorMotor[*,*] != OPEN AND mEmergencyBrake == FALSE AND DriveSpeed(s,d) == (LevelingSpeed, DOWN) AND DesiredDirection == DOWN |
| 6.T.9 | mEmergencyBrake == FALSE AND DriveSpeed(s,d) == (SlowSpeed, DOWN) AND CommitPoint > mDesiredFloor(f) |
| 6.T.10 | mEmergencyBrake == FALSE AND CommitPoint == mDesiredFloor(f) |
| 6.T.11 | mEmergencyBrake == FALSE AND DriveSpeed(s,d) == (SlowSpeed, DOWN) AND CurrentFloor = mDesiredFloor(f) |
| 6.T.12 | mEmergencyBrake == TRUE OR (mLevelDown == TRUE AND (mDoorClosed[*,*] = FALSE OR DesiredDIrection == STOP)) |
| 6.T.13 | mEmergencyBrake == TRUE |
| 6.T.14 | mEmergencyBrake == TRUE |
| 6.T.15 | mEmergencyBrake == TRUE |
| 6.T.16 | mEmergencyBrake == TRUE |
| Requirements |
||||||||||
|
States |
6.6 | 6.7 | 6.8 | 6.9 | 6.10 | 6.11 | 6.12 | 6.13 | 6.14 | 6.15 |
| State 1: Stop | x | x | x | |||||||
| State 2: Level Up | x | x | x | x | x | |||||
| State 3: Slow Up | x | x | x | x | ||||||
| State 4: Fast Up | x | x | x | |||||||
| State 5: Level Down | x | x | x | x | x | x | ||||
| State 6: Slow Down | x | x | x | x | ||||||
| State 7: Fast Down | x | x | ||||||||
| Transitions | ||||||||||
| 6.T.1 | x | x | ||||||||
| 6.T.2 | x | |||||||||
| 6.T.3 | x | |||||||||
| 6.T.4 | x | |||||||||
| 6.T.5 | x | |||||||||
| 6.T.6 | x | x | ||||||||
| 6.T.7 | x | x | ||||||||
| 6.T.8 | x | |||||||||
| 6.T.9 | x | |||||||||
| 6.T.10 | x | |||||||||
| 6.T.11 | x | |||||||||
| 6.T.12 | x | x | ||||||||
| 6.T.13 | x | |||||||||
| 6.T.14 | x | |||||||||
| 6.T.15 | x | |||||||||
| 6.T.16 | x | |||||||||

| Transition |
Condition |
| 7.T.1 |
mDoorClosed[*,*] != True AND DesiredDirection == d |
| 7.T.2 | mDoorClosed[*,*] != True |
| 7.T.3 | mDoorClosed[*,*] == True |
| 7.T.4 | mDoorClosed[*,*] == True |
| Requirements |
||||
| States |
7.2 |
7.3 |
||
| State
1: Door Closed |
X |
|||
| State
2: Lantern On |
X |
|||
| State
3: Lantern Off |
X |
|||
| Transitions |
||||
| 7.T.1 |
X |
|||
| 7.T.2 | X |
|||
| 7.T.3 | X |
|||
| 7.T.4 | X |
|||
| Transition |
Condition |
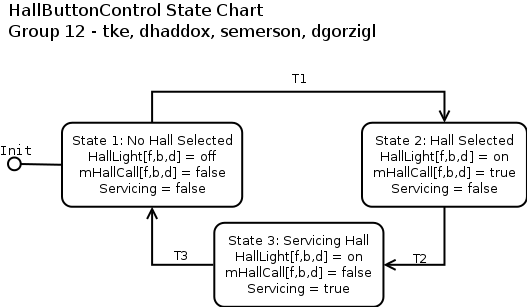
| 8.T.1 |
HallCall[f,b,d] == Pressed |
| 8.T.2 |
mDoorClosed[b,r] == False AND CurrentFloor = f AND (DesiredDirection == d OR DesiredDirection == Stop) |
| 8.T.3 |
mDoorClosed[*,*] == True |
| Requirements | |||||||||
| States | 8.1.1 |
8.1.2 |
8.1.3 |
8.2.1 |
8.2.2 |
8.2.3 |
8.3.1 |
8.3.2 |
8.3.3 |
| State 1: No Hall Selected | X | X | X | ||||||
| State 2: Hall Selected | X | X | X | ||||||
| State 3: Servicing Hall | X | X | X | ||||||
|
Transitions |
|||||||||
| 8.T.1 | X | X | X | ||||||
| 8.T.2 | X | X | X | ||||||
| 8.T.3 | X | X | X | ||||||

| Transition |
Condition |
| 9.T.1 | CarCall[f,b] == TRUE |
| 9.T.2 | mDoorClosed(b,r) == FALSE AND mAtFloor[f,b] == TRUE |
|
Requirements |
|||||||||
| States | 9.1.1 | 9.1.2 | 9.2.1 | 9.2.2 | |||||
| State 1: No Floor Selected | X | X | |||||||
| State 2: Floor Selected | X | X | Transitions | ||||||
| 9.T.1 | X | X | |||||||
| 9.T.2 | X | X | |||||||
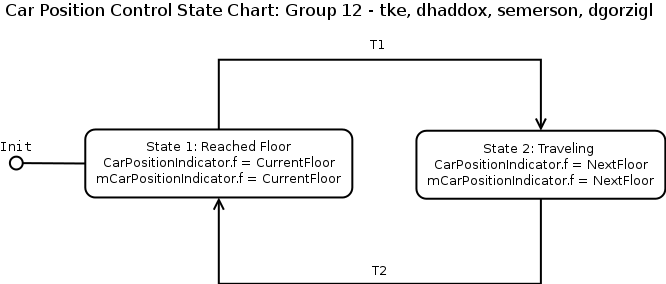
| Transition |
Condition |
| 10.T.1 | mDriveSpeed(s) > LevelingSpeed |
| 10.T.2 | mDriveSpeed(s) <= LevelingSpeed |
| Requirements |
||||
| States |
10.4 | 10.5 | 10.6 | |
| State
1: Traveling |
X | X | ||
| State
2: Reached Floor |
X | X | ||
| Transitions | ||||
| 10.T.1 |
X | |||
| 10.T.2 | X | |||
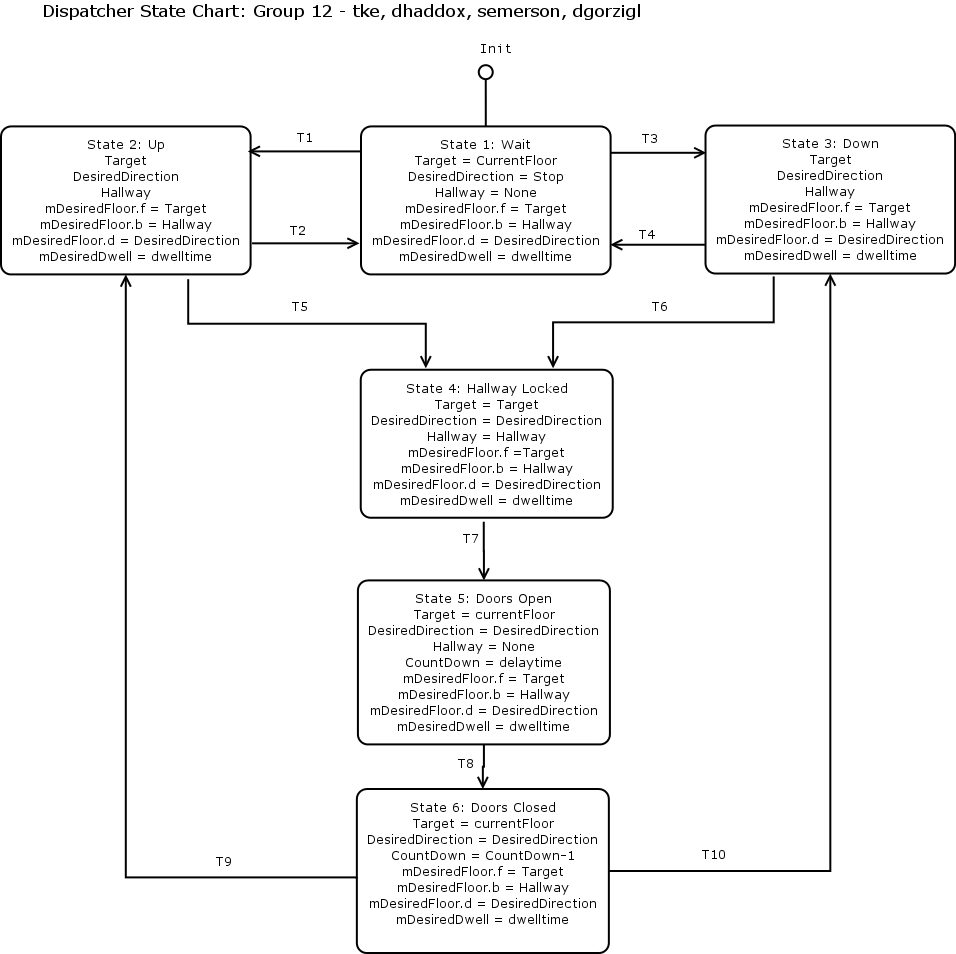
| Transition |
Condition |
| 11.T.1 |
UpCalls = true |
| 11.T.2 |
UpCalls = false |
| 11.T.3 |
DownCalls = true |
| 11.T.4 |
DownCalls = false |
| 11.T.5 |
hallway != Hallway.NONE |
| 11.T.6 |
hallway != Hallway.NONE |
| 11.T.7 |
mDoorClosed[f,b] == false |
| 11.T.8 |
mDoorClosed[*,*] == true |
| 11.T.9 |
countDown == 0 AND desiredDirection == Direction.UP |
| 11.T.10 |
countDown == 0 AND desiredDirection == Direction.DOWN |
| Requirements | |||||||||||||||
| States | 11.4 |
11.5 |
11.6 |
11.7 |
11.8 |
11.9 |
11.10 |
11.11 |
11.12 |
11.13 |
11.14 |
11.15 |
|||
| State 1: | X | X | |||||||||||||
| State 2: | X | X | X | X | X | X | X | X | |||||||
| State 3: | X | X | X | X | X | X | X | X | |||||||
| State 4: | X | X | |||||||||||||
| State 5: | X | X | |||||||||||||
| State 6: | X | X | |||||||||||||
|
Transitions |
|||||||||||||||
| 11.T.1 | X | ||||||||||||||
| 11.T.2 | X | ||||||||||||||
| 11.T.3 | X | ||||||||||||||
| 11.T.4 | X | ||||||||||||||
| 11.T.5 | X | ||||||||||||||
| 11.T.6 | X | ||||||||||||||
| 11.T.7 | X | ||||||||||||||
| 11.T.8 | X | ||||||||||||||
| 11.T.9 | X | ||||||||||||||
| 11.T.10 | X | ||||||||||||||